介紹 在理想情況下在實(shí)驗(yàn)室條件下測(cè)量風(fēng)力渦輪機(jī)性能的傳統(tǒng)方法總是趨于樂觀,并且很少反映渦輪機(jī)在實(shí)際情況下的實(shí)際行為。實(shí)際性能將受到當(dāng)?shù)仫L(fēng)力條件,附近障礙物,電力需求情況和一系列其他因素的影響。由于磨損,隨著時(shí)間的推移性能也會(huì)下降。重要的是渦輪機(jī)如何反應(yīng)并實(shí)際在現(xiàn)場(chǎng)提供動(dòng)力。沒有適當(dāng)?shù)臄?shù)據(jù),這可能是非常主觀的,也是個(gè)人意見的問題。 本應(yīng)用指南重點(diǎn)介紹特定Proven WT2500風(fēng)力發(fā)電機(jī)的實(shí)時(shí)功率,轉(zhuǎn)子速度和風(fēng)速數(shù)據(jù),該風(fēng)力發(fā)電機(jī)已連續(xù)運(yùn)行6年。從這些測(cè)量中獲得的信息可以幫助確定是否需要維護(hù)。對(duì)數(shù)據(jù)的進(jìn)一步解釋可以幫助優(yōu)化風(fēng)力渦輪機(jī),并且可以評(píng)估它是否位于正確的位置。
背景

在福克蘭群島,大約有100個(gè)遠(yuǎn)程家庭和農(nóng)場(chǎng)無法使用電網(wǎng)。1996年,福克蘭群島發(fā)展公司啟動(dòng)了可再生能源計(jì)劃,現(xiàn)在有60多個(gè)運(yùn)行中的電力系統(tǒng)使用經(jīng)過驗(yàn)證的風(fēng)力渦輪機(jī) Proven系列最初的選擇是因?yàn)槠鋱?jiān)固的結(jié)構(gòu)和能夠承受持續(xù)的高速風(fēng),福克蘭群島的年平均風(fēng)速超過8.5米/秒。以相對(duì)高的轉(zhuǎn)速運(yùn)行的小型商用風(fēng)力渦輪機(jī)通常具有短的壽命,并且那些不會(huì)完全失效的風(fēng)力渦輪機(jī)遭受快速的前緣葉片侵蝕,因此需要定期的葉片修理或更換。Proven相對(duì)較低的運(yùn)行速度被認(rèn)為是提高其長(zhǎng)期成功機(jī)會(huì)的一個(gè)因素。這已得到證實(shí),因?yàn)橐恍┙?jīng)過驗(yàn)證的風(fēng)力渦輪機(jī)已經(jīng)運(yùn)行了10年。 轉(zhuǎn)子細(xì)節(jié) 經(jīng)驗(yàn)證的風(fēng)力渦輪機(jī)是順風(fēng)水平軸類型。轉(zhuǎn)子由三個(gè)聚丙烯葉片構(gòu)成,每個(gè)葉片在葉片根部具有兩個(gè)彈簧加載的鉸鏈。該組件被稱為Zebedee鉸鏈并且包括內(nèi)鉸鏈(成角度為90度)和外鉸鏈(成45度角)。兩個(gè)鉸鏈一起工作以有效地扭轉(zhuǎn)葉片作為自動(dòng)無源葉片俯仰和動(dòng)力控制系統(tǒng)。該系統(tǒng)通常設(shè)置為低迎角,以便在低風(fēng)速下輕松啟動(dòng)。隨著渦輪加速,離心力導(dǎo)致鉸鏈打開。這使刀片變平,增加了對(duì)相對(duì)氣流的攻角。離心力和節(jié)距都隨轉(zhuǎn)子速度增加。在狂風(fēng)中,葉片上的風(fēng)力克服了彈簧張力和轉(zhuǎn)子盤錐體,兩者都使葉片失速并減小了有效的轉(zhuǎn)子盤面積并因此減小了動(dòng)力輸出。軸扭矩的增加將使葉片抵抗離心力的作用,離心力將傾向于關(guān)閉鉸鏈,從而減小迎角。 彈簧張力在出廠時(shí)設(shè)定為在額定12 m / s風(fēng)速及以上的最大運(yùn)行速度300 rpm(5轉(zhuǎn)/秒)下運(yùn)行。彈簧安裝件的磨損和彈簧在使用中失去彈性會(huì)導(dǎo)致失速和錐形在較低的風(fēng)速下開始,從而降低渦輪機(jī)的最大功率輸出。 發(fā)電機(jī)細(xì)節(jié) 久經(jīng)考驗(yàn)的風(fēng)力渦輪機(jī)是一種變速三相永磁交流發(fā)電機(jī),由在24個(gè)定子線圈內(nèi)旋轉(zhuǎn)的四極對(duì)組成。每個(gè)線圈名義上產(chǎn)生30伏特,并且每相8個(gè)線圈在制造期間以串聯(lián)和并聯(lián)組合布置,以產(chǎn)生產(chǎn)生24,48,120或240伏特的風(fēng)力渦輪機(jī)。中性線不能作為生產(chǎn)機(jī)器上的共同點(diǎn)。使用四極對(duì)發(fā)電機(jī)的額定轉(zhuǎn)速為300 rpm,產(chǎn)生20 Hz的線路頻率。
網(wǎng)站詳情 對(duì)于Port Louis農(nóng)場(chǎng)的風(fēng)力渦輪機(jī),車主懷疑渦輪機(jī)性能不佳并提供用于這些試驗(yàn)。路易港是馬島的歷史部分和最后一個(gè)人從事任何科學(xué)工作在這里可能是查爾斯·達(dá)爾文在19 個(gè)世紀(jì)。 小型風(fēng)力渦輪機(jī)的合適位置的選擇通常受到將渦輪機(jī)功率輸出傳送到充電控制器和電池所需的重型電力電纜的成本的限制。大多數(shù)渦輪機(jī)都位于發(fā)電廠100米范圍內(nèi),包括電池組,柴油發(fā)電機(jī),逆變器和風(fēng)力發(fā)電機(jī)充電控制面板。渦輪機(jī)選址始終是一種妥協(xié),可能導(dǎo)致不太理想的風(fēng)。為了減少電力電纜中的直流功率損耗,福克蘭群島的大多數(shù)渦輪機(jī)工作電壓為48 V(50-60 A),但少數(shù)工作電壓為24 V(100-120 A)。 路易斯WT2500風(fēng)力渦輪機(jī)設(shè)計(jì)為在12米/秒的風(fēng)速下在48伏特下產(chǎn)生2.5千瓦的功率,距離發(fā)電站110米,在建筑物西北部略微上升的土地上。它的位置使其與普遍的西風(fēng)相對(duì)不受阻擋。然而,在標(biāo)準(zhǔn)的6.5米桅桿上相對(duì)低于地面時(shí),渦輪機(jī)比安裝得更高時(shí)更容易受到振動(dòng)和湍流的影響。
戰(zhàn)略與設(shè)計(jì) 為了獲得足夠的數(shù)據(jù)以獲得有意義的結(jié)果,必須實(shí)時(shí)記錄三個(gè)細(xì)節(jié): 1.渦輪機(jī)的輸出功率。(瓦) 2.渦輪轉(zhuǎn)速(轉(zhuǎn)/秒) 3.風(fēng)速(m / s) 分析需要儀器來測(cè)量4個(gè)參數(shù): 1.系統(tǒng)電壓 2.系統(tǒng)電流 3.渦輪轉(zhuǎn)速 4.風(fēng)速 界面和軟件 基于ADC-16 8通道模數(shù)轉(zhuǎn)換器設(shè)計(jì)了一種實(shí)時(shí)同時(shí)測(cè)量和記錄該信息的方法。ADC-16可以測(cè)量-2.5至+2.5伏直流的直流信號(hào)。PicoLog軟件允許在程序內(nèi)進(jìn)行縮放,以便校正,校準(zhǔn)和轉(zhuǎn)換因子可以自動(dòng)應(yīng)用于收集的記錄,從而最大限度地減少電子表格處理。大多數(shù)數(shù)據(jù)處理都是使用Microsoft Excel執(zhí)行的。 附加電路 信號(hào)處理需要額外的電路,以便可以對(duì)渦輪轉(zhuǎn)子速度和風(fēng)速進(jìn)行測(cè)量。新的信號(hào)處理電路旨在最大化ADC-16接口的工作范圍,以提高精度和精度。 渦輪轉(zhuǎn)速和風(fēng)速測(cè)量均被感測(cè)為低頻AC波形。使用四極永磁交流發(fā)電機(jī),經(jīng)過驗(yàn)證的渦輪機(jī)最大轉(zhuǎn)速為300 rpm,交流頻率為20 Hz。同樣,風(fēng)速計(jì)的輸出頻率為20 m / s,為25.7 Hz。為了將輸入的AC信號(hào)轉(zhuǎn)換為可由ADC-16記錄的DC電壓,基于LM 2917集成電路(IC)構(gòu)建了兩個(gè)類似的頻率到電壓轉(zhuǎn)換器。使用制造商的數(shù)據(jù)表計(jì)算元件值,得到0-25 Hz的工作范圍,將其轉(zhuǎn)換為0-2.5伏的輸出,以匹配ADC-16的輸入范圍。
連接測(cè)試設(shè)備 測(cè)試設(shè)備連接到Proven控制面板,如下圖1所示。
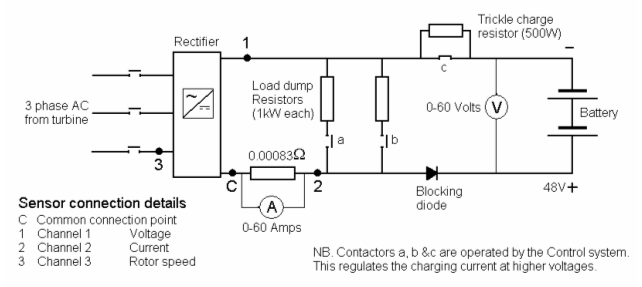 圖1:連接傳感器
圖1:連接傳感器
通道1 - 系統(tǒng)電壓 構(gòu)造一個(gè)分壓器,將48伏直流線從Proven控制面板下降到可測(cè)量的電壓。 通道2 - 系統(tǒng)電流 這是使用現(xiàn)有的Proven電流分流器測(cè)量的,該電流分流器設(shè)計(jì)為在60安培的電流下提供50 mV的電壓。
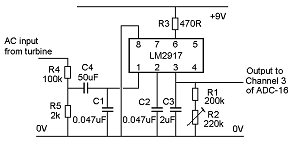 圖2:頻率到電壓轉(zhuǎn)換器- 轉(zhuǎn)子速度測(cè)量
圖2:頻率到電壓轉(zhuǎn)換器- 轉(zhuǎn)子速度測(cè)量
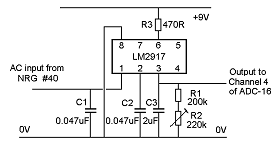 圖3:頻率到電壓轉(zhuǎn)換器- 風(fēng)速測(cè)量
圖3:頻率到電壓轉(zhuǎn)換器- 風(fēng)速測(cè)量
通道3 - 渦輪轉(zhuǎn)速 這是從風(fēng)力渦輪機(jī)整流器的三相輸入的一相導(dǎo)出的。在Proven控制面板內(nèi)與風(fēng)力渦輪機(jī)的AC線路的一相進(jìn)行物理連接。設(shè)計(jì)了一個(gè)分壓器,將峰值交流電壓降低到1.5到2伏特左右。由于這是頻率測(cè)量,因此電壓并不重要。圖2顯示了用于為ADC-16創(chuàng)建電壓的頻率到電壓轉(zhuǎn)換器。 第4頻道 - 風(fēng)速 使用的傳感器是NRG#40風(fēng)速計(jì)頭,一個(gè)行業(yè)標(biāo)準(zhǔn)單元。將其安裝在垂直于風(fēng)軸線的風(fēng)力渦輪機(jī)旁邊約5米的輪轂高度處。NRG#40使用小型永磁發(fā)電機(jī)產(chǎn)生交流信號(hào),其頻率與風(fēng)速成正比。使用頻率到電壓轉(zhuǎn)換器將風(fēng)速計(jì)AC輸出轉(zhuǎn)換為電壓(圖3)。
測(cè)量條件 理想情況下,測(cè)試應(yīng)該應(yīng)用于驅(qū)動(dòng)恒定阻抗負(fù)載的風(fēng)力渦輪機(jī)。然而,這不是一個(gè)選擇,因?yàn)殡娏ο到y(tǒng)全面運(yùn)行,為農(nóng)場(chǎng)建筑和住宅提供真正的負(fù)荷。在測(cè)試期間,柴油發(fā)電機(jī)正在運(yùn)行供電并為電池充電。這有助于穩(wěn)定48伏直流電壓總線,并最大限度地減少瞬態(tài)負(fù)載沖擊,如果僅使用電池和風(fēng),則會(huì)改變負(fù)載阻抗并影響讀數(shù)。在測(cè)試過程中,Proven轉(zhuǎn)儲(chǔ)負(fù)載控制系統(tǒng)已停用。 主要測(cè)量值均在一天內(nèi)風(fēng)速從13米/秒穩(wěn)步下降至6米/秒時(shí)進(jìn)行。PicoLog軟件在記錄間隔中允許一定的寬容度,但通常每秒讀取所有四個(gè)參數(shù)并以500秒的塊記錄。當(dāng)風(fēng)速計(jì)固定在輕便的便攜式伸縮式桅桿上時(shí),如果風(fēng)改變,可以改變風(fēng)速計(jì)的位置以保持相對(duì)位置。
數(shù)據(jù)處理 主要數(shù)據(jù)被分箱并在5秒到1分鐘的不同時(shí)間塊上取平均值。這是為了由于其自身與風(fēng)速計(jì)之間的慣性差異??而允許渦輪機(jī)響應(yīng)的延遲。檢查后,選擇使用30秒塊的數(shù)據(jù)集作為進(jìn)一步處理的最佳選擇。
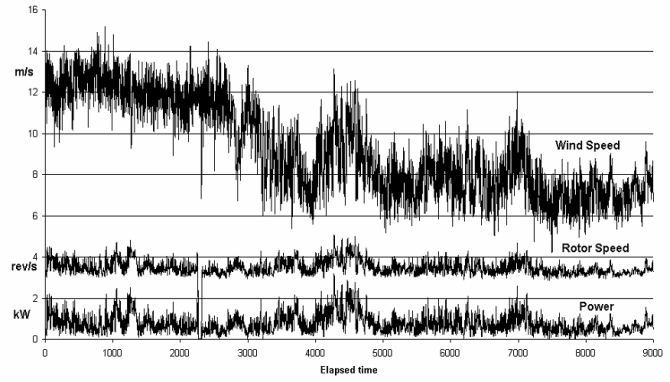 圖4:整個(gè)測(cè)試概述
圖4:整個(gè)測(cè)試概述
在圖5中繪制了功率與風(fēng)的關(guān)系圖,并且將經(jīng)驗(yàn)證的WT2500公布的功率曲線重疊以進(jìn)行比較。這顯示了數(shù)據(jù)在30秒塊中被平均和分箱后整個(gè)運(yùn)行的功率與風(fēng)速的關(guān)系。
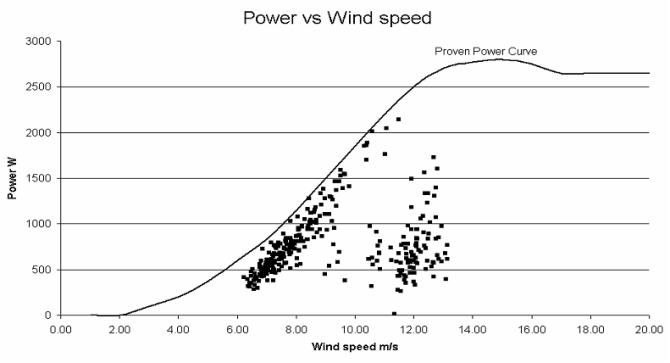 圖5:記錄的功率和風(fēng)速
圖5:記錄的功率和風(fēng)速
圖6比較了相同持續(xù)時(shí)間的風(fēng)速和轉(zhuǎn)子速度。兩幅圖都清楚地表明,在風(fēng)速超過10米/秒的情況下存在嚴(yán)重的過度調(diào)節(jié),這使風(fēng)力渦輪機(jī)無法達(dá)到其最大功率潛力,并且永遠(yuǎn)不會(huì)達(dá)到5轉(zhuǎn)/秒(300轉(zhuǎn)/分鐘)的額定速度。
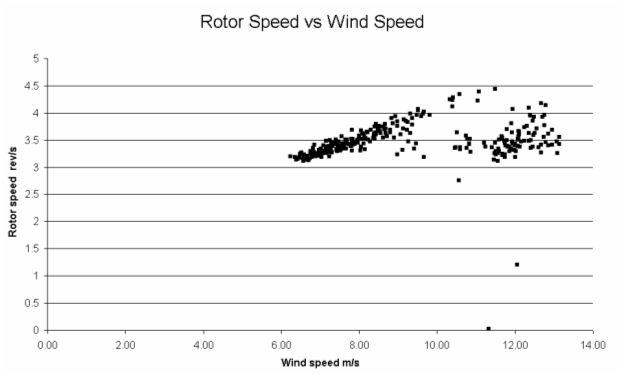 圖6:轉(zhuǎn)子速度和風(fēng)速
圖6:轉(zhuǎn)子速度和風(fēng)速
超過10米/秒,功率調(diào)節(jié)導(dǎo)致葉片錐形,記錄的早期數(shù)據(jù)不穩(wěn)定,使用這些數(shù)字會(huì)扭曲進(jìn)一步的數(shù)據(jù)處理。截止點(diǎn)設(shè)定為3500秒,在此點(diǎn)之前的讀數(shù)不用于詳細(xì)計(jì)算。由于白天風(fēng)速不低于6米/秒,調(diào)節(jié)速度為10米/秒,最終結(jié)果是基于3.1至4.4轉(zhuǎn)/秒的窄轉(zhuǎn)子轉(zhuǎn)速。 評(píng)估風(fēng)力渦輪機(jī)性能的通用標(biāo)準(zhǔn)是功率系數(shù)與尖端速度比性能曲線的關(guān)系圖。該曲線告訴您渦輪機(jī)如何有效地將風(fēng)能轉(zhuǎn)換為電能。使用各種方法繪制該曲線。結(jié)果顯示在下面的圖7中。
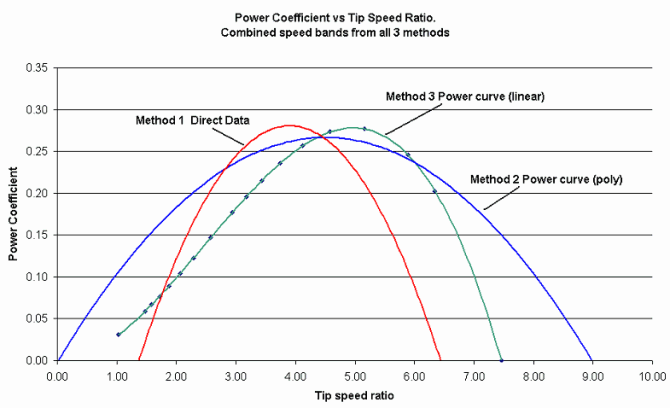 圖7:功率系數(shù)與尖端速度比
圖7:功率系數(shù)與尖端速度比
實(shí)地觀察 經(jīng)過驗(yàn)證的WT 2500風(fēng)力渦輪機(jī)經(jīng)過精心設(shè)計(jì),能夠承受相對(duì)較短的桅桿上的湍流區(qū)域中的惡劣條件,該桅桿比其他設(shè)計(jì)更接近地面。結(jié)果,它會(huì)遇到陣風(fēng)和風(fēng)向的快速但微小的變化,導(dǎo)致它在其偏航軸周圍顯著地連續(xù)加速,減速和振蕩。它很少以穩(wěn)定的速度直接指向風(fēng)。 在測(cè)試期間,注意到風(fēng)速計(jì)對(duì)風(fēng)的變化反應(yīng)非常快并且與方向無關(guān)。另一方面,風(fēng)力渦輪機(jī)的更大慣性將導(dǎo)致旋轉(zhuǎn)和偏航的響應(yīng)延遲。被動(dòng)葉片控制機(jī)構(gòu)本質(zhì)上也會(huì)略微落后于風(fēng)的變化。由于Zebedee鉸鏈的作用,旋轉(zhuǎn)速度和偏航方向引起的葉片角度的姿態(tài)意味著風(fēng)力渦輪機(jī)很少在實(shí)際操作條件下瞬間匹配理論最大發(fā)電值。這與風(fēng)洞測(cè)試形成鮮明對(duì)比,其中偏航和剪切風(fēng)不是問題,并且渦輪機(jī)有時(shí)間在負(fù)載或風(fēng)速的變化之間穩(wěn)定下來以呈現(xiàn)反映其最佳性能的穩(wěn)定讀數(shù)集。 高風(fēng)運(yùn)行 人們認(rèn)為風(fēng)力渦輪機(jī)在測(cè)試之前表現(xiàn)不佳,這些測(cè)試證明這是正確的。超過10米/秒的風(fēng)速產(chǎn)生了渦輪機(jī)的不穩(wěn)定功率輸出,遠(yuǎn)低于額定值。
結(jié)論 如圖7所示,3.5至4.0轉(zhuǎn)/秒的速度范圍在較高的尖端速度比下產(chǎn)生比其他速度帶更高的功率系數(shù)。請(qǐng)記住,這些測(cè)試是在低于標(biāo)準(zhǔn)的風(fēng)力渦輪機(jī)上進(jìn)行的,結(jié)果似乎表明它在3.5到4.0轉(zhuǎn)/秒的中速范圍內(nèi)更有效地運(yùn)行。