燃?xì)鉁u輪發(fā)動(dòng)機(jī) 當(dāng)今大多數(shù)飛機(jī)所使用的噴氣發(fā)動(dòng)機(jī)是燃?xì)鉁u輪發(fā)動(dòng)機(jī)最常用的,但燃?xì)鉁u輪機(jī)也用于火車,輪船,坦克以及發(fā)電站的蒸汽渦輪機(jī)以發(fā)電。

圖1:燃?xì)鉁u輪發(fā)動(dòng)機(jī) 在燃?xì)鉁u輪發(fā)動(dòng)機(jī)中,加壓氣體 - 通常是空氣 - 用于旋轉(zhuǎn)渦輪機(jī)。進(jìn)入發(fā)動(dòng)機(jī)的空氣與燃燒的燃料如丙烷或噴氣燃料混合。燃燒的燃料產(chǎn)生的熱量使空氣膨脹并沖過(guò)渦輪機(jī)使其旋轉(zhuǎn)。 燃?xì)鉁u輪發(fā)動(dòng)機(jī)具有更大的功率重量比,并且可以用比傳統(tǒng)的往復(fù)式(活塞)發(fā)動(dòng)機(jī)更小的發(fā)動(dòng)機(jī)產(chǎn)生相同的功率。 不幸的是,燃?xì)鉁u輪發(fā)動(dòng)機(jī)也有其缺點(diǎn)。通常,渦輪機(jī)可以以超過(guò)10,000rpm的速度旋轉(zhuǎn) - 速度超過(guò)100,000rpm在小型渦輪機(jī)中并不罕見(jiàn),這與發(fā)動(dòng)機(jī)所承受的高溫相結(jié)合,使得燃?xì)鉁u輪機(jī)的設(shè)計(jì)和制造變得昂貴。燃?xì)鉁u輪機(jī)在恒定負(fù)載下最有效地運(yùn)行,并且燃?xì)鉁u輪機(jī)將在空轉(zhuǎn)期間或者如果負(fù)載波動(dòng)時(shí)使用往復(fù)式發(fā)動(dòng)機(jī)的更多燃料。 一個(gè)微微數(shù)據(jù)記錄儀是用來(lái)記錄一個(gè)輔助動(dòng)力裝置的各種參數(shù)保持發(fā)動(dòng)機(jī)轉(zhuǎn)速和渦輪排氣溫度記錄的目的-對(duì)發(fā)動(dòng)機(jī)的安全運(yùn)行非常重要,并允許進(jìn)行分析PID速度控制系統(tǒng)和調(diào)整穩(wěn)定運(yùn)行。

圖2:連接Pico數(shù)據(jù)記錄器 輔助動(dòng)力裝置或APU最初用于軍事應(yīng)用,作為“空氣生產(chǎn)者”或發(fā)電機(jī)的主要推動(dòng)者。這些小型渦輪機(jī)提供重量輕,功率大的輸出,并使用與直升機(jī)和噴氣式飛機(jī)中的主發(fā)動(dòng)機(jī)相同的油和燃料。 “空氣發(fā)生器”基本上是渦輪驅(qū)動(dòng)的低壓高質(zhì)量流量壓縮機(jī)。壓縮空氣通過(guò)一個(gè)小型冷空氣渦輪機(jī)連接到主發(fā)動(dòng)機(jī)上,以便將其卷繞到起動(dòng)速度。作為發(fā)電機(jī),渦輪機(jī)可以連續(xù)啟動(dòng)和運(yùn)行,為飛機(jī)提供地面動(dòng)力,以保持戰(zhàn)斗準(zhǔn)備就緒。當(dāng)飛機(jī)被派遣執(zhí)行任務(wù)時(shí),APU從地面發(fā)電切換到發(fā)動(dòng)機(jī)啟動(dòng)模式。
使用PicoLog監(jiān)控引擎參數(shù)
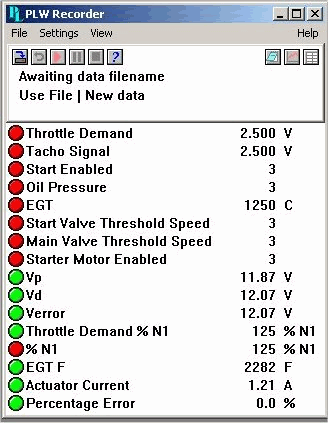
圖3:記錄的參數(shù) 使用PicoLog記錄以下引擎參數(shù): 節(jié)氣門需求 - 節(jié)氣門是一個(gè)電位計(jì),用于設(shè)定渦輪機(jī)的目標(biāo)速度。Pico數(shù)據(jù)記錄器直接記錄此電壓。渦輪機(jī)由PID控制器控制,以保持發(fā)電速度恒定,或者為發(fā)動(dòng)機(jī)起動(dòng)目的保持空氣輸送常數(shù)。 轉(zhuǎn)速計(jì)信號(hào) - 渦輪機(jī)配有磁力傳感器,通常位于減速箱中的某個(gè)位置,用于測(cè)量渦輪軸速度。這對(duì)于維持發(fā)動(dòng)機(jī)的壽命和安全性具有根本重要性(以及渦輪機(jī)入口溫度)。磁拾取器的輸出是脈沖序列; 將其轉(zhuǎn)換為電壓,然后由數(shù)據(jù)記錄器記錄。轉(zhuǎn)速計(jì)輸出對(duì)于表征渦輪機(jī)在加速度和負(fù)載下的動(dòng)態(tài)特性也是必不可少的,以便能夠建立PID控制器的初始增益常數(shù)。 啟動(dòng)已啟用 - 這只是在按下啟動(dòng)開(kāi)關(guān)時(shí)記錄,并充當(dāng)循環(huán)指示器的開(kāi)始。 油壓 - 一旦按下啟動(dòng)開(kāi)關(guān),渦輪機(jī)將通過(guò)其電動(dòng)啟動(dòng)馬達(dá)加速。在某些時(shí)候,渦輪機(jī)齒輪箱中的油泵將建立安全的最小油壓。這會(huì)關(guān)閉記錄的繼電器,并啟用點(diǎn)火。如果未建立油壓,則無(wú)法啟用點(diǎn)火。 EGT - 廢氣溫度。該參數(shù)使用排氣中的熱電偶測(cè)量。原始熱電偶電壓被放大和縮放以提供以攝氏度為單位的實(shí)時(shí)溫度顯示,并且還被記錄。溫度也是控制回路輸入之一,以防止突然的油門變化超過(guò)渦輪機(jī)限制。 啟動(dòng)閥門/主閥門閾值速度 - 當(dāng)發(fā)動(dòng)機(jī)在啟動(dòng)階段加速時(shí),檢測(cè)到增加的轉(zhuǎn)子速度,并且在各個(gè)階段,閥門自動(dòng)打開(kāi)以允許燃料進(jìn)入燃燒室。這有助于使渦輪機(jī)保持在其限制之下,即使PID控制回路可能要求最大加油。記錄這些速度閾值。 起動(dòng)電機(jī)啟用 - 在啟動(dòng)循環(huán)的加速階段的某個(gè)時(shí)刻,不再需要起動(dòng)電機(jī),并且斷電。此“速度閾值”也會(huì)被記錄。 Vp / Vd / Verror - 記錄比例和微分項(xiàng)的輸出信號(hào),以及循環(huán)誤差,以便確定系統(tǒng)的動(dòng)態(tài),優(yōu)化系統(tǒng)的穩(wěn)定性和瞬態(tài)響應(yīng)(不記錄積分項(xiàng))在這個(gè)特定的設(shè)置)。 節(jié)氣門需求%N1 - 在渦輪機(jī)應(yīng)用中,以最大額定軸速度的百分比表示轉(zhuǎn)子速度是方便和常規(guī)的。在多軸渦輪機(jī)中,將有多個(gè)'%N'指示,%N1%N2等。 %N1 - 實(shí)際轉(zhuǎn)子速度顯示為最大額定速度的百分比。 EGT F--由于渦輪機(jī)是美國(guó)的,而模擬儀表是華氏溫度,因此它顯示了華氏溫度下的廢氣溫度。 執(zhí)行器電流 - 燃料供應(yīng)由比例執(zhí)行器閥控制,該閥由電流控制。記錄執(zhí)行器電流以確定要測(cè)量的系統(tǒng)增益。 百分比誤差 - 節(jié)流閥需求與實(shí)際轉(zhuǎn)子轉(zhuǎn)速%N1之間的差異。例如,當(dāng)PID積分項(xiàng)接通時(shí),這很容易觀察到,并且誤差趨于零。
PID控制器 PID是Proportional,Integral,Derivative的首字母縮寫(xiě)。簡(jiǎn)單來(lái)說(shuō),PID控制器通過(guò)測(cè)量設(shè)備的輸入進(jìn)行操作,然后通過(guò)更改輸出將其保持在設(shè)定的水平,這樣,PID控制器無(wú)需操作員進(jìn)行連續(xù)調(diào)整以維持穩(wěn)定的系統(tǒng)。 為了與渦輪機(jī)系統(tǒng)一起使用,構(gòu)造了PID回路控制器,并且在渦輪機(jī)運(yùn)行時(shí)使用數(shù)據(jù)記錄器來(lái)測(cè)試其有效性。使用PicoLog數(shù)據(jù)記錄軟件生成測(cè)試結(jié)果圖,如下所示(圖4)。
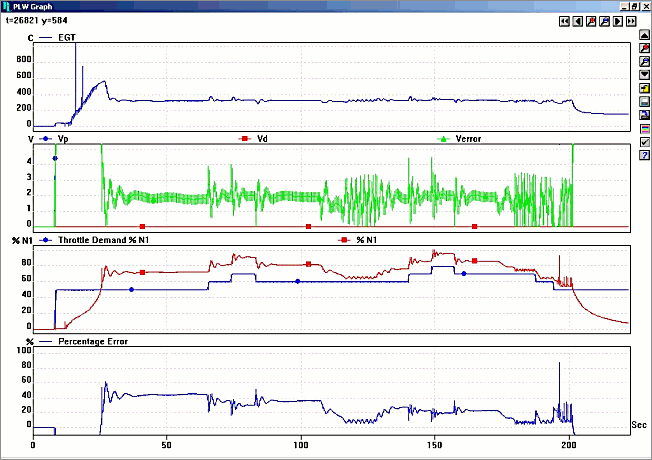
圖4:PID回路分析 從結(jié)果可以看出,在測(cè)試的早期,回路誤差很大(油門需求為50%,實(shí)際速度為72%),并且發(fā)動(dòng)機(jī)響應(yīng)也是振蕩到油門的階躍變化。 在測(cè)試大約110秒時(shí),PID電路的比例增益增加。這種增加導(dǎo)致環(huán)路誤差的相關(guān)減少,但系統(tǒng)變得不穩(wěn)定,因此比例增益在約130秒時(shí)再次減小。 記錄的數(shù)據(jù)顯示了控制器的初始設(shè)計(jì)有多糟糕,并且需要進(jìn)行大量的開(kāi)發(fā)工作才能實(shí)現(xiàn)精度和穩(wěn)定性的所需平衡。