如果你已經看到我們的視頻解碼DCC串行總線,你就會知道如何使用的PicoScope ? 6軟件用的PicoScope USB示波器捕獲和解碼DCC(數字化指揮控制)由霍恩比DCC選擇控制器產生的波形。這是Hornby的一些數字火車組提供的基本控制器。 Robbie Honnor是Hornby數字系統的外部beta測試人員。在本應用指南中,他繼續從視頻開始,使用PicoScope 2408B對Hornby DCC Elite控制器產生的信號進行解碼,該控制器比Select更先進,并且有更多的軟件可供分析。
關于解碼器的說明
數字列車通過根據DCC串行協議對信號進行編碼并將其發送到機車(移動)或靜態(附件)解碼器來工作。軌道上的每個機車攜帶機車解碼器以接收來自控制器的指令。靜態解碼器位于模型鐵路布局的旁邊或隱藏在其下方,并處理與布局本身相關的指令,例如點,信號,動畫和場景照明。
重要的是不要將這些硬件解碼器與PicoScope 6軟件中內置的17個串行解碼器混淆。雖然如果沒有PicoScope 6 DCC解碼器,這里討論的技術是不可能的,但在本應用筆記中使用“解碼器”一詞涉及靜態和機車解碼器。
設備
Hornby DCC精英控制器
的霍恩比精英是一個全功能的先進數字控制器,能夠在單個布局同時運行64臺機車。您可以通過兩個手動控制通道中的任何一個設置這些可能的定位器中的每一個。Elite還支持主要和編程軌道上的點和其他附件的控制,以及機車和靜態解碼器的完整編程。它通過USB連接到您的PC,以允許固件更新和與模型鐵路控制軟件的交互。

PicoScope 2408B示波器
所述的PicoScope 2408B 是具有128 MS捕獲存儲器和1 GS / s的取樣速率的4通道的設備。有關更多信息,請訪問產品規格頁面。
TA189 30 A AC / DC電流探頭
我在必要時將Pico Technology TA189電流探頭連接到示波器的通道B,以便在我測量另一個通道上的電壓的同時測量信號的電流。
PicoScope 6軟件
所述的PicoScope 6軟件具有用于多種協議,包括DCC解碼器支持。在準備本應用筆記時,我最初使用的是最新的beta版本,然后是可用的穩定版本。

Hornby DCC Elite控制器連接
Elite輸出連接如下:
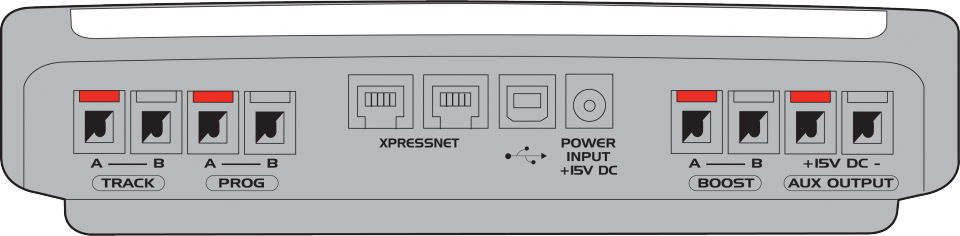
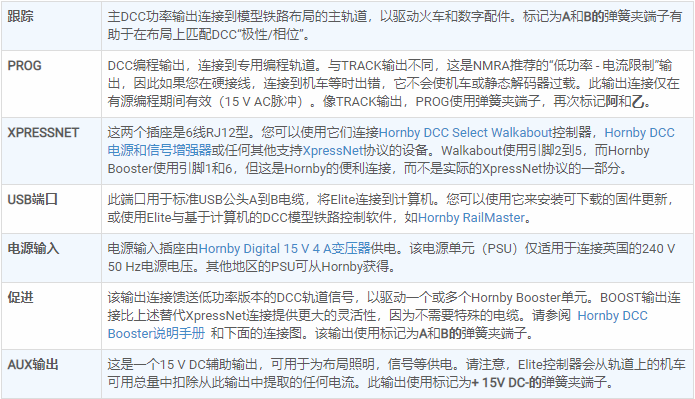
設置設備 安裝了PicoScope 6軟件并將PicoScope 2408B連接到PC后,我將隨示波器提供的四個TA132電壓探頭中的每一個連接到通道輸入,并按照探頭用戶指南中的說明進行補償。 我使用ESU解碼器測試儀來模擬軌道上的火車。這個有用的設備允許您安裝機車或靜態解碼器,檢查它是否正常運行,必要時重新設置,并在將其安裝到機車或布局之前添加任何自定義設置。對于本應用筆記,我只使用了機車解碼器。 然后我將斷線連接到Elite的各種外部電路,以便連接TA132電壓探頭。對于TRACK,BOOST和PROG輸出,我使用提供的彈簧鉤探針尖端將每個探針連接到來自輸出A端子的導線,并將探針接地夾在相關B端子的導線上。同樣,我將分支線連接到RJ引腳1和6以測試XpressNet輸出。這與探頭到信號源和夾子到公共地的傳統示波器連接相反,但是由于它正確地捕獲了峰峰值目標信號并避免了平行接地路徑問題,所以我始終使用這種方法。可以忽略接地夾并僅探測任一輸出端子。 我還在ESU測試臺中安裝了一臺Hornby Sapphire解碼器作為工作負載。這是比DCC解碼視頻中使用的數字機車解碼器更先進的模型。稍后的應用筆記將探討藍寶石解碼器的全部潛力,并查看與其特殊功能相關的高級數據包DCC信號 - 如果您希望提前閱讀,請參閱Sapphire規范和NMRA S-9.2.1高級數據包定義。 為清楚起見,上面顯示的基本設備設置僅使用通道A,探頭的分支線連接到ESU測試儀上的螺釘端子,以實現最可靠的連接。我通過每個Elite輸出的分支線同樣設置其他通道。

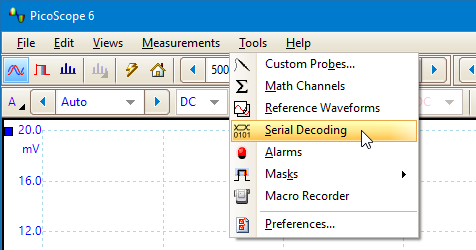
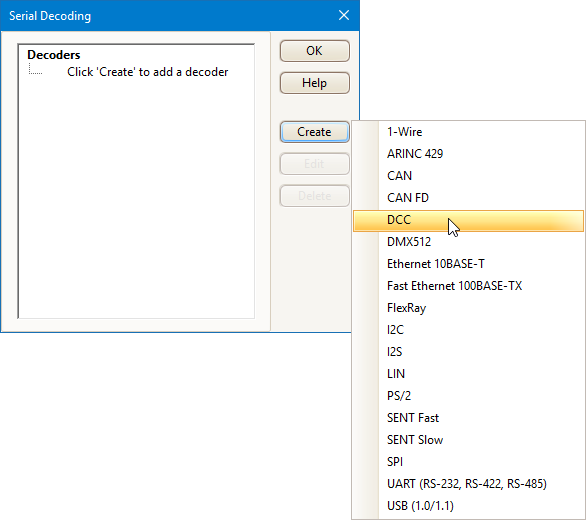
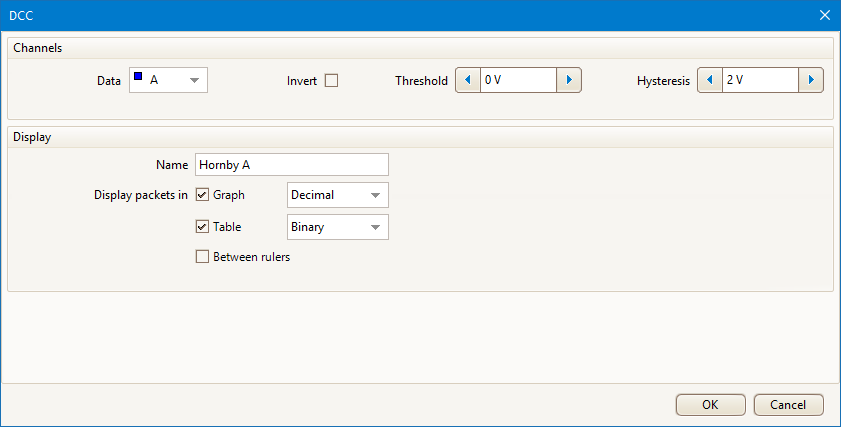
串行解碼 我們現在準備開始解碼從Elite控制器發送的各種DCC串行總線。 正如您在DCC解碼視頻中看到的那樣,通過PicoScope 6中的“工具”菜單控制串行解碼。只需單擊工具 > 串行解碼,單擊創建并選擇DCC即可開始。 對于本應用筆記中的所有測試,我將閾值設置為0 V,滯后設置為2 V.我還為串行數據表選擇了二進制格式。
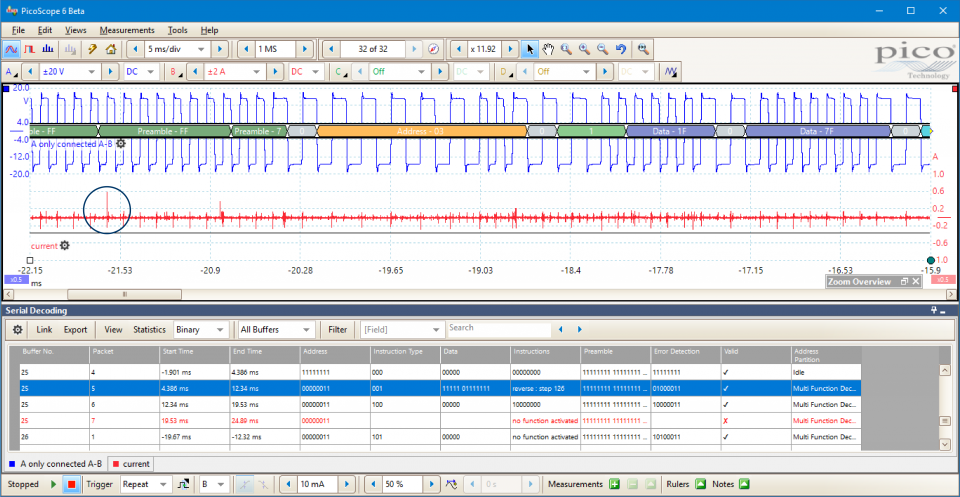
TRACK輸出 我們將首先使用通道A查看來自Elite TRACK輸出終端的DCC信號,并注意盡管它與DCC解碼視頻中看到的未過濾信號基本相似,但我們現在已經在圖形顯示屏上顯示了擴展數據包附加命令進入藍寶石解碼器,控制開關定向燈等功能。 右側的屏幕截圖是使用測試版軟件捕獲的。圖像的上半部分是圖形顯示,我們可以看到通道A(藍色)拾取DCC數據包并顯示大約±15 V的典型DCC電壓,以及通道B(紅色)拾取時的TA189電流鉗位藍寶石解碼器在負載下運行大約0.2 A. 通常建議您確保您的機車解碼器能夠處理機車的失速電流消耗。我通過手動停止電機檢查了這一點,導致屏幕截圖中顯示當前的尖峰。 屏幕截圖的下半部分包含表格顯示,通過鏈接文件,我們可以將二進制數據轉換為更容易消化的文本,向我們展示來自Elite的命令。需要進一步的工作來完成鏈接文件的所有列中從二進制到文本的轉換。 由于我沒有正確設置低通濾波器并且軌道系統上只有輕負載 - 只有ESU解碼器測試儀,因此DCC信號的一些振鈴在此屏幕截圖中顯而易見。當軌道上有許多軌道時,即使它們處于靜止狀態,振鈴也會受到更好的阻尼。 請注意,默認情況下,靜態和機車解碼器總是在監聽多個地址:自己設置的短地址或長地址,分配的多個機車編組地址,以及廣播地址,如“緊急 - 全部停止”或編程指令(編組允許您將多個機車控制為一個,例如您可能用于重型列車或與銀行家引擎協商陡峭的坡度時。 在圖表上的彩色數據流中,我們可以看到解碼器在地址0003的前導碼之后響應,然后對給定的指令和數據采取行動,然后進行錯誤檢查(剛好在圖表之外)并再次收聽進一步的指令。實際上,解碼器不會執行任何命令,直到錯誤檢查表明它們是好的:如果有錯誤,解碼器會忽略命令并恢復監聽。
BOOST輸出 我們現在將使用軟件的穩定版本來查看通道D上Elite的BOOST終端的輸出,并將其與通道A上的TRACK輸出進行比較。如上面Elite的連接列表所示,BOOST信號是低能量指令中繼器,發送到Hornby Booster單元。增壓器接收Elite DCC信號,將其放大并傳遞到第二個電隔離電源區,Booster本身通過其自身的PSU提供全部跟蹤功率。請參閱下面的XPRESSNET輸出部分中的連接圖。 我使用與TRACK端子相同的方法將通道D探頭和接地夾連接到BOOST A和B端子,但這在Elite屏幕上產生錯誤消息,指示極性不匹配或短路。為了糾正錯誤,我將連接調整為探測,一切都很好,表明Elite內部存在某種問題。調查顯示印刷電路板(PCB)的設計存在錯誤。Hornby將允許其投入生產,因為外部Hornby Booster會自動切換BOOST輸出的極性,無需用戶干預。我注意到以后在連接到XPRESSNET輸出時可能出現類似問題時要注意。 從上圖可以看出,通道A和通道D的波形完全相同。沒有明顯的滯后:如果有,它將影響機車從一個動力區到另一個動力區的控制過渡。 在串行數據表再次設置為二進制的情況下,地址字段(上圖中的左側框)顯示值00000011,其與解碼器地址0003相關; 在說明字段(圖像中的右側框)中,我們可以看到應用的各種速度步驟。一些其他指令,等同于解碼器是否工作到有限的V-Max(受限制的最高速度)或128速度步長(正常設置)仍然以二進制形式顯示,再次反映了對鏈接文件的進一步工作的需要。

XPRESSNET輸出 您也可以使用XpressNet RJ12電纜連接連接增壓器單元,如右圖所示的圖1所示。但是,這種方法不如直接連接方法好,因為它不是實際的XpressNet數據流,只是方便地使用RJ12插頭上的備用送絲,它實際上可以扭曲Walkabout控制器使用的XpressNet數據。圖4中的圖像被認為是最直接的,因此是最佳的,直接連接方法的助推器。

TRACK,BOOST和XPRESSNET的比較 對于此測試,我將通道C電壓探頭的分支線連接到XpressNet RJ引腳1(白色,RailSync B)和6(藍色,RailSync A)。這一次,Elite上沒有出現任何錯誤消息。右側的屏幕截圖顯示,通道C(綠色)基本上是通道D(黃色)BOOST輸出的副本,它們都與通道A(藍色)TRACK輸出同步。請注意,所有頻道都會偶爾出現一些匹配的鈴聲。 和以前一樣,如果將表設置為二進制,則“地址”字段(屏幕截圖中的左側框)難以閱讀,但“說明”字段中的許多條目都是純文本,我在鏈接文件中輸入了該條目。在這里我們可以看到功能1和2已經在數據包1038中打開,并且再次在數據包1045中打開。仍然是二進制,我們還可以看到數據包1034和1035中的V-Max和128速度步驟指令以及數據包1041和1042。

與Elite編程 我們現在簡要介紹一下編程,這篇文章太大了,我們希望在將來的應用筆記中更深入地討論它。使用Elite,服務模式和操作模式進行編程有兩種基本方法。
我們編程的是什么?為什么? 簡短的回答是解碼器配置變量(CV)。這些是靜態和機車解碼器的特殊特性,我們可以通過寫入一系列值來改變解碼器響應DCC命令的方式。 有1024個可用的CV,每個有8位,給出了從0到255的一系列可能的十進制值。并非所有的解碼器都允許更改所有的CV,并且并非所有的CV都使用全范圍的值。 基本解碼器的CV很少可以改變,但更高級的解碼器,如藍寶石和大多數聲音解碼器,制造商都有更多的CV,這些可以改變。一些聲音解碼器的用戶手冊可能令人生畏!
運作模式 在操作模式下,編程命令通過Elite的TRACK輸出發送。即使主軌道上有多個機車,這也是可能的,因為編程命令被發送到指定的地址,正如我們用正常的機車速度和方向指令所看到的那樣。 這很有用,因為它允許您在特定機車運行時對其進行更改,并立即生效。您可以使用操作模式來改變加速度和/或減速率,設置音量,命令加油,啟動閃爍燈等。在下一個DCC應用筆記中,我們將看到該系統如何發送特定的靜態或機車解碼器的地址,然后是編程指令。
服務模式 在廣播條件下在隔離的編程軌道上執行編程。“廣播”信號是在沒有任何特定地址的情況下發送的信號,因此范圍內的任何靜態或機車解碼器將接收以這種方式發出的編程指令。 該模式還利用了一種稱為確認(簡稱ACK)的巧妙功能。當被詢問時,靜態或機車解碼器將在其同意的情況下發送ACK,通常通過向機車電機施加短脈沖:控制器接收該電流浪涌,然后進入下一個任務。 數字解碼器僅在接收到復位分組之前的有效服務模式指令分組時才進入服務模式。 服務模式分為三種子模式:
注冊模式 在此模式下只能訪問八個寄存器,具體如下:
 目前,這種有限的編程模式并不經常使用。
目前,這種有限的編程模式并不經常使用。
分頁模式 分頁模式在寄存器模式下擴展到1024 CV的全范圍,然后寄存器6將“頁面”分成四個CV的組(因此Page 1 = CV 1到4,Page 2 = CV 5到8,Page 3 = CV 9到12等)。許多靜態和機車解碼器不支持這種方法,但DCC控制器通常足夠智能以識別哪些解碼器可以和哪些解碼器不能。
分頁模式 分頁模式在寄存器模式下擴展到1024 CV的全范圍,然后寄存器6將“頁面”分成四個CV的組(因此Page 1 = CV 1到4,Page 2 = CV 5到8,Page 3 = CV 9到12等)。許多靜態和機車解碼器不支持這種方法,但DCC控制器通常足夠智能以識別哪些解碼器可以和哪些解碼器不能。
直接模式 這是最常用的方法,速度更快。它允許訪問所有解碼器的CV,并允許您快速讀取或寫入定義每個CV的值的單個8位,從0到255。 早期的編程模式非常慢,因為它們要求控制器向解碼器詢問CV(n)是否為值1,如果不是,則值為2,如果不是,則值為3,依此類推,可能通過所有256個值。直接模式詢問每個CV的8位,并且由于每個位只能具有0或1的值,因此該過程僅詢問CV(n)的位1是否為值1,然后位2是否為值1,是否為位3是值1,依此類推。如果位的值為1,則解碼器將發送ACK,如果為0,則不會發送,因此該方法意味著控制器仍然可以在更短的時間內找到CV的值。我們將在下一個應用筆記中找出串行數據表是否可以選擇它。
PROG輸出(用于服務模式) 我從Elite的TRACK終端上卸下了ESU測試儀,并將其連接到PROG終端。這是另一種低能量輸出,NMRA建議在編程期間使用該輸出來保護靜態和機車解碼器免受用戶接線錯誤的可能損壞。使用ESU測試儀排除了這種類型的接線錯誤,但如果繼續錯誤地安裝,解碼器仍然存在風險。 我像以前一樣將通道A探頭連接到ESU分支線。我還將Channel B探測器連接到了Elite的BOOST終端,因為有一個奇怪的Elite特征我想捕獲以供稍后評論。 在Elite上設置單獨編程軌道的唯一原因是服務模式信號是廣播信號,沒有特定地址(參見上面的屏幕截圖),并且范圍內的所有靜態和機車解碼器都將受到此處發出的任何編程指令的影響。辦法。 上面的屏幕截圖是通過更改CV1將服務模式的直接子模式中的解碼器地址從其默認值0003更改為新數字的簡單示例。像往常一樣,表數據是相當難以理解的,表明創建和填充鏈接文件對于我們對DCC信號的理解有多重要。 注意當Elite激勵編程數據時編程信號如何上升和下降,以及共享相同輸出繼電器的BOOST數據如何與脈沖動作匹配。

編程靜態和機車解碼器:一個入門 使用Select控制器,錯誤地編程主軌道上的任何或所有機車都非常容易,因為它使用了一個兩用DCC輸出,您可以設置為跟蹤電源或編程,因此您必須記住切換從主運行軌道到單獨的編程軌道的電線,以匹配適當的模式。 Elite通過每個模式的獨立輸出端子克服了這個問題,從而允許控制器永久連接到主操作軌道和單獨的編程軌道,從而避免了交換連接的需要和錯誤編程整個車隊的風險。機車錯誤。當Elite調用編程時,它僅將操作模式命令指向主軌道上的指定靜態或機車解碼器地址,而它將服務模式命令廣播到在編程軌道上監聽的任何內容。 為了改進NMRA S-9.2.3定義的低能耗節目建議,并進一步努力保護靜態和機車解碼器免受因安裝布線不良而造成的損壞,Elite也會在編程軌道上切斷電源。實際上發送任何編程信號。這個保護措施在Elite上可見,因為內部繼電器點擊并且指示燈LED閃爍,我們也可以在上面的跟蹤中看到它,我們將在下一個應用筆記中更全面地討論。
文章摘要 我們從各個通道的軌跡中看到,更先進的Elite控制器如何同時輸出到多個外部電路以及DCC信號如何保持同步,以便在隔離電源區域內有效控制機車。 根據NMRA的推薦做法,我們已確認一些產出能源較低。 我們可以看到鏈接文件的重要性,作為將示波器看到的數據包流轉換為我們可以立即在表中讀取或導出到文件以便稍后進行深入分析的關鍵。 我們還發現了Elite的BOOST輸出的極性問題,并將其追溯到印刷電路板上的已知錯誤。在客戶手中,這種交叉極性不是問題,因為外部Hornby Booster會自動檢測并反轉Elite輸出端子上發現的任何不匹配的極性。 我們簡要地檢查了操作模式和服務模式之間數據包的差異,并說明了在服務模式下,BOOST輸出如何受到Elite硬件設計功能的影響。
下一步是什么? 在下一個應用筆記中,我們將更仔細地研究使用Elite編程靜態和機車解碼器,看看我們是否可以使用PicoScope軟件確定當我們讀取現有CV值或為其寫入新值時DCC信號如何變化在運營和服務模式下。 需要注意的一點是,靜態和機車DCC解碼器的工作方式與PicoScope 6軟件非常相似,使用信號的邊沿檢測可以更好地區分有效位和任何噪聲,因此這種檢測點邏輯在我們的未來的任務。 我們還將研究先進的解碼器如Hornby Sapphire和Twin Track Sound(TTS)解碼器如何處理擴展的分組DCC信號流量,并嘗試在PicoScope 6跡線上對其進行解碼。